南昌零新传动设备:行星式ZPLE060-12机床用行星齿轮箱
检验结果证明,启方式的建筑门窗其气密性和水密性均可达到国标 水平。当前我国的门窗行业使用的这种五金及型材系统的结构大部分与欧洲的现行系统相同。其特点是除了窗扇的四个边可以同时锁紧外,五金系统可以实现窗扇相对于窗框的三维调整,限度地保证了门窗各项性能处于状态。影响门窗经济性能建筑门窗行业也存在激烈的市场竞争,能够摆脱单一价格竞争营造良性市场环境的重要途径之一就是不断丰富产品功能,用技术优势扩展产品利润空间。
衡量行减速机性能的几个关键技术参数是:减速比,平均寿命,额定输出扭矩,回程间隙,满载效率,噪音,横向/径向受力和工作温度。输出转速与输入转速的比值。
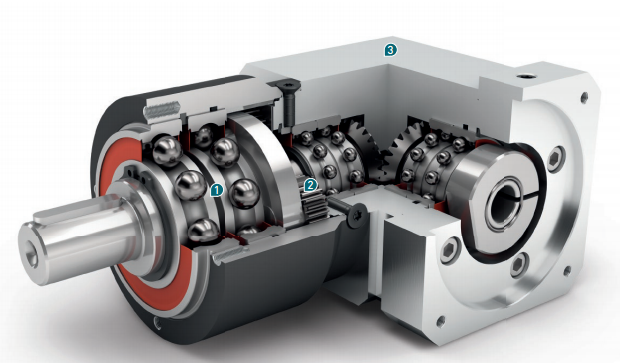
级数:太阳轮及其周围的行星轮构成独立的减速轮系,如减速机内只此一个轮系,我们称为“ ”。为得到较大减速比,需多级传动。
平均寿命: 指减速机在额定负载下,输入转速时的连续工作时间。
额定输出扭矩: 指在额定负载下长期工作时允许输出扭矩。输出扭矩是该值的两倍。 回程间隙: 将输出端固定,输入端顺时针和逆时针方向旋转,使输出端产生额定扭矩的±2%扭矩时,减速机输入端有一个微小的角位移,此角位移即为回程间隙。单位是“弧分”。
润滑方式:行星减速机在整个使用期间无需润滑。 满载效率: 指在负载情况下,减速机的传输效率。它是衡量减速机的一关键指标, 满载效率高的减速机发热少,整体性能好。
噪音:单位是分贝(dB)A。此数值是在输入转速为3000转/分钟时,不带负载,距离减速机一米距离时测量的。
现场中的精密行星减速机串轴故障均从输入轴的串动而表现出来。造成串轴的原因主要有两个方面:
1、是中间轴上的从动齿轮与轴紧固不牢所致。在实际传动中,往往由于从动齿轮与中间轴之间的过盈量不够,从动齿轮相对中间轴产生轴向串动,进而使输入轴发生轴向串动。因此,过盈量不够是造成串轴的主要原因。另外,精密行星减速机的转向对串轴也有一定的影响。
2、是由于断齿使输入轴失去轴向约束而发生串轴。
解决措施:提高齿轮的强度,齿轮的精度,降低齿轮和轴的粗糙度数值。提高从动齿轮与轴的精度紧固性, 主要是精密行星减速机齿轮达到合理的过盈配合。
步进电机和伺服电机的区别在于:1、控制精度不同。步进电机的相数和拍数越多,它的度就越高,伺服电机取块于自带的编码器,编码器的刻度越多,精度就越高。2、控制方式不同;一个是环控制,一个是闭环控制。3、低频特性不同;步进电机在低速时易出现低频振动现象,当它工作在低速时一般采用阻尼技术或细分技术来克服低频振动现象,伺服电机运转非常平稳,即使在低速时也不会出现振动现象。交流伺服系统具有共振功能,可涵盖机械的刚性不足,并且系统内部具有频率解析机能(FFT),可检测出机械的共振点便于系统调整。4、矩频特性不同;步进电机的输出力矩会随转速升高而下降,交流伺服电机为恒力矩输出,5、过载能力不同;步进电机一般不具有过载能力,而交流电机具有较强的过载能力。6、运行性能不同;步进电机的控制为环控制,启动频率过高或负载过大易丢步或堵转的现象,停止时转速过高易出现过冲现象,交流伺服驱动系统为闭环控制,驱动器可直接对电机编码器反馈信号进行采样,内部构成位置环和速度环,一般不会出现步进电机的丢步或过冲的现象,控制性能更为可靠。7、速度响应性能不同;步进电机从静止加速到工作转速需要上百毫秒,而交流伺服系统的加速性能较好,一般只需几毫秒,可用于要求快速启停的控制场合。 综上所述,交流伺服系统在许多性能方面都优于步进电机,但是价格比就不一样了。
+
100-P2-S2