-P2直交轴伺服变速器
电磁阀有很多种,不同的电磁阀在控制系统的不同位置发挥作用, 常用的是单向阀、安全阀、方向控制阀、速度调节阀等。安全操作电磁阀须知:前仔细阅读产品说明书,检查产品是否符合使用要求,记住要点,好准备工作。校对铭牌所标参数与所选用产品的参数是否一致,电源电压应满足额定电压电压波动范围:交流+1%~-15%,直流+1%~-1%,平时线圈组件不宜拆。电磁阀接管之前用.3MPa的压力对管道冲洗,把管道中的金属粉末及密封材料残留物,锈垢等。
-P2直交轴伺服变速器
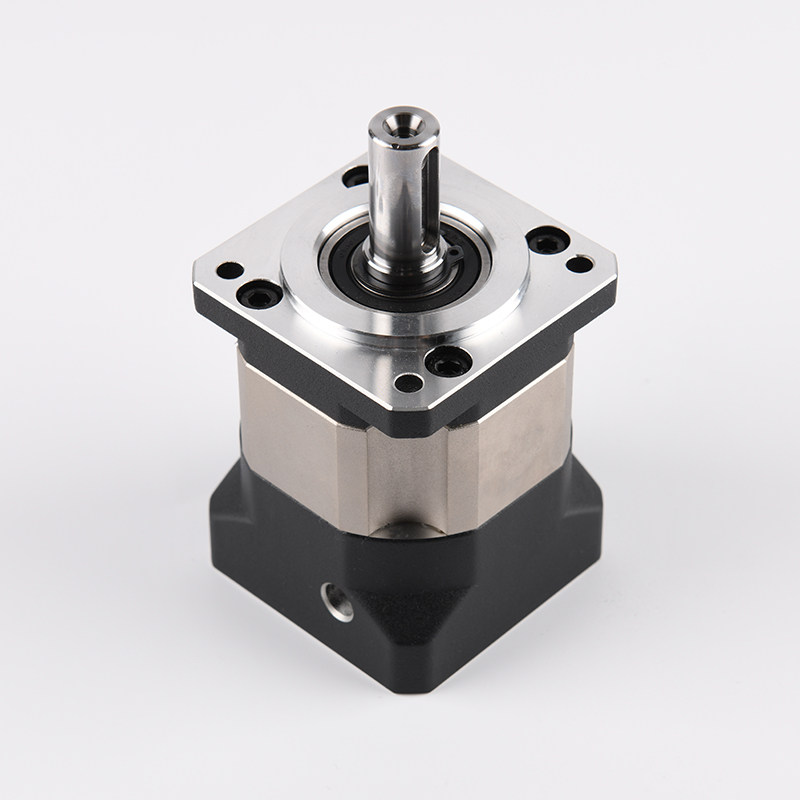
行星减速机的工作原理是由一个内齿圈紧密结合于齿轮箱壳体上,环齿中心有一个自外部动力所驱动太阳轮,介于两者之间有一组由三颗齿轮等分组合于托盘上之行星齿轮组该组行星齿轮依靠着出力轴、内齿圈及太阳轮支撑浮游于期间;行星减速机当入力侧动力驱动太阳轮时,可带动行星齿轮自转,并依循着内齿圈之轨迹沿着中心公转,游星之旋转带动连结于行星架出力轴输出动力。根据其工作原理来说行星减速机不具备自锁功能。
王洞乡新机电:步进式PLX142-L1-5-S2-P2直交轴伺服变速器
驱动电机的性能是会直接影响到直接驱动机器人性能指标的好坏,是机器人直接驱动技术的关键。可以这样说,直接驱动伺服电机必须具备以下特性:
1、高转矩/重量比
在机器人等多自由度系统中应用直接驱动伺服电机时,电动机自身的重量将成为下一个关节的电动机的负载的一部分,因此直接驱动电动机的小型轻量化尤为重要。除了把电动机集中于机座上以外,直接驱动电动机的转矩/重量比都将给机器人的设计带来制约。
2、高输出转矩
要使直接驱动方式成为可能,直接驱动伺服电机必须能够输出足够大的转矩。例如,应用于机器人驱动时,电动机的输出转矩应为传统驱动方式中伺服电动机输出转矩的50~100倍。
在现代行星传动中,往往较弱的环节是在齿轮的传递上,为了满足重载条件下的使用性能,为了提高行星减速机承载能力,现根据实际生产提出以下几种方法:
一、增大齿圈接触应力
行星减速机校核强度通常是校核太阳轮-行星轮的传动接触应力,太阳轮-行星轮弯曲应力,行星轮-内齿轮传动接触应力。
齿圈接触应力通常是失效,所以要想增大承载能力,首先要保证齿圈接触应力。
二、齿轮修形
齿形修缘、修根和齿端修型是改善重载齿轮传动性能较好的法,因为对于重载齿轮,一般在齿端修型可以防止由于齿向误差引起的齿端过载。
三、变位系数的调整
正确的选择变位系数,可使齿轮承载能力提高20%到30%。
四、控制齿轮精度与误差
齿面强度不仅与齿轮精度等级有关,而且与基节误差的值有关,若齿轮的基节误差大,那么加在轮齿上的滚动压力也大。
五、要选择好齿轮的材料
六、齿根强化
齿轮的弯曲强度与齿根表面状况关系很大,特别是渗碳淬火齿轮的齿根部位表面存在脱碳层等缺陷,难以保证残余压力,使齿根弯曲疲劳强度降低,所以采取齿根强化措施提高疲劳强度。
七、增加齿宽
在行星减速机传动外径要求不变时,适当增加内部齿轮宽度,可以有效的加大齿轮的承载能力。
八、增大齿轮模数、增大齿形角
行星减速机外径尺寸不变,需要增大承载能力,可以采取合理增大齿轮模数,减少齿轮齿数来满足。
王洞乡新机电:步进式PLX142-L1-5-S2-P2直交轴伺服变速器
+ -K
PL120 0-P2-K
< -100-P2-K
PLF160 -P2-K
秤钩可用胶粘接于钢件底部。应变片则用专用应变胶粘剂粘接于钢件变形的部位(内侧正中)。这时其受力变化与阻值变化刚好相反。拎环应用活动链条与秤体连接,以便使用时秤体能自由下垂,同时拎环还应与秤钩在同一垂线上。在调试过程中,应准备1千克及2千克标准砝码各一,其过程如下:1.首先在秤体自然下垂已无负载时调整RP1,使显示器准确显示零。再调整RP2,使秤体承担满量程重量(本电路选满量程为2千克)时显示满量程值。