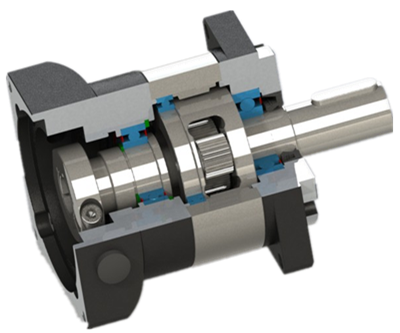
-P2单级行星变速机
我的这一转变,又一次证明了水往低处流,人往高处走具有普遍意义!好不容易了一套惬意的房子。站在空荡的房子中间,我的内心充满着对未来的憧憬和对美好生活的渴望这种兴奋足以让人完全忘记囊中羞涩的困惑我立即把精力投入到构筑理想家居的梦幻之中。我和找来许多现代家庭装修设计的书籍,左看右看,总是不得要领;冷静下来后,我们决定不跟风,不追求时尚,而是根据自己的实际,从轻从简从实,以人本化理念指导家庭装修,于是制定了风、雅、颂三条原则。
行星减速机的专业术语
减速比:输入转速与输出转速之比。
级数:行星齿轮的套数。一般可以达到三级,效率会有所降低。
满载效率:在负载情况下(故障停止输出扭矩),减速机的传递效率。
工作寿命:行星减速机在额定负载下,额定输入转速时的累计工作时间。
额定扭矩:是额定寿命允许的长时间运转的扭矩。当输出转速为100转/分,减速机的寿命为平均寿命,超过此值时减速机的平均寿命会减少,当输出扭矩超过两倍时减速机故障。
噪音:单位分贝dB(A),此数值实在输入转速3000转/分,不带负载,距离减速机1米距离时测量值。
回差:将输入端固定,是输出端顺时针和逆时针方向旋转,当输出端承受正负2%额定扭矩时,减速机输出端由一个微小的角位移,此角位移即为回程间隙,也称“背隙”。单位是“分”,即一度的1/60。
原因及对策
1.误差影响
过程齿形误差、齿距误差、齿向误差是导致传动噪声的主要误差。也是齿轮传动精度难以保证的一个问题点。
齿形误差小、齿面粗糙度小的齿轮,在相同试验条件下,其噪声比普通齿轮要小10dB。齿距误差小的齿轮,在相同试验条件下,其噪声级比普通齿轮要小6~12dB。但如果有齿距误差存在,负载对齿轮噪声的影响将会减少。
齿向误差将导致传动功率不是全齿宽传递,接触区转向齿的这端面或那个端面,因局部受力增大轮齿挠曲,导致噪声级提高。但在高负载时,齿变形可以部分弥补齿向误差。
齿轮噪声的产生与传动精度有很直接的关系。
2.装配同心度和动平衡
装配不同心将导致轴系运转的不平衡,且由于齿论啮合半边松半边紧,共同导致噪声加剧。高精度齿轮传动装配时的不平衡将严重影响传动系统精度。
3.齿面硬度
随着齿轮硬齿面技术的发展,其承载能力大、体积小、重量轻、传动精度高等特点使其应用领域日趋广泛。但为获得硬齿面采用的渗碳淬硬使齿轮产生变形,导致齿轮传动噪声增大,寿命缩短。为减少噪声,需对齿面进行精。目前除采用传统的磨齿方法外,又发展出一种硬齿面刮削方法,通过修正齿顶和齿根,或把主被动轮的齿形都调小,来减少齿轮啮入与啮出冲击,从而减少齿轮传动噪音。
4.系统指标检定
在装配前零部件的精度及对零部件的选法(完全互换,分组选配,单件选配等),将会影响到系统装配后的精度等级,其噪声等级也在影响范围之内,因此,装配后对系统各项指标进行检定(或标定),对控制系统噪声是很关键的。
一般伺服都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式 。之所以有这三中控制方式,是因为伺服一般为三个环控制。所谓三环就是3个闭环负反馈PID调节系统。由伺服系统的三个控制回路来实现。 第1环是电流环,它是 内环。此环完全在伺服驱动器内部进行,通过霍尔装置检测驱动器给电机的各相的输出电流,负反馈给电流的设定进行PID调节,从而达到输出电流尽量接近等于设定电流,电流环就是控制电机转矩的,所以在转矩模式下驱动器的运算,动态响应 。 第2环是速度环,它是次外环,通过检测的电机编码器的信号来进行负反馈PID调节,它的环内PID输出直接就是电流环的设定,所以速度环控制时就包含了速度环和电流环,换句话说任何模式都必须使用电流环,电流环是控制的根本,在速度和位置控制的同时系统实际也在进行电流(转矩)的控制以达到对速度和位置的相应控制。 第3环是位置环,它是 外环,可以在驱动器和电机编码器间构建也可以在外部控制器和电机编码器或 终负载间构建,要根据实际情况来定。由于位置控制环内部输出就是速度环的设定,位置控制模式下系统进行了所有3个环的运算,此时的系统运算量,动态响应速度也 慢。
+< 020-K-P2-P1< 100-K-P2-P1< 020-K-P2-P1< 100-K-P2-P1