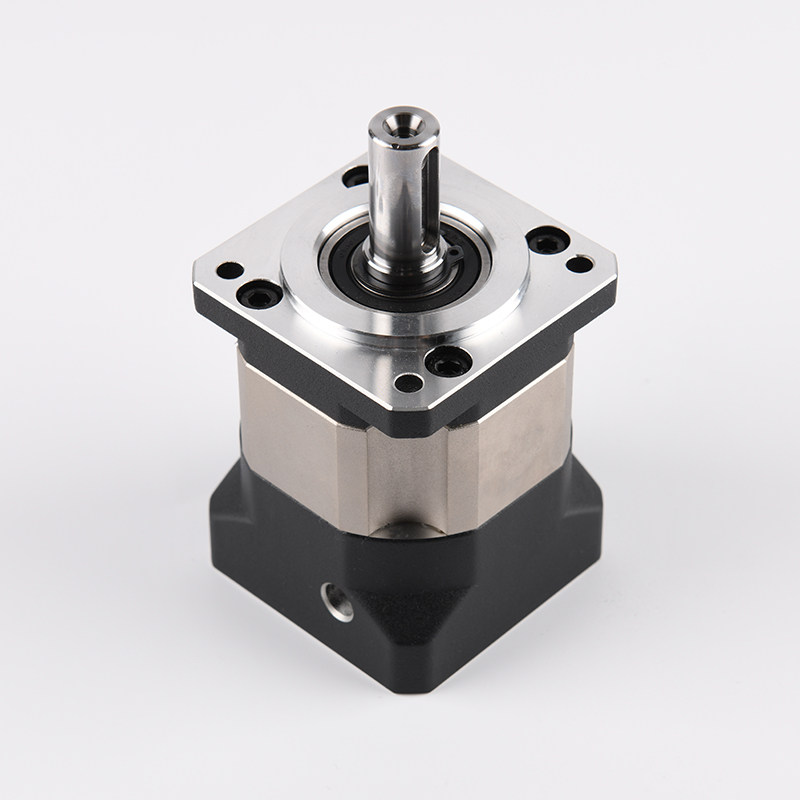
7-14机械手伺服减速器
看外表:好 的表面镀铬工艺是十分讲究的,一般都是经过几道工序才能完成。分辨水 好坏要看其光亮程度,表面越光滑越亮代表质量越好。转把柄:好 在转动把手时, 与关之间没有过度的间隙,而且关轻松无阻,不打滑。可劣质水 不仅间隙大,受阻感也大。听声音: 的材质是 不好分辨的。好 是整体浇铸铜,敲打起来声音沉闷。如果声音很脆,那一定是不锈钢的,质量就要差一个档次了。识标记:如果实在不会分辨,可以选择正规一点的品牌。
机械减速机装置能分别起以下作用:
1、改变动力机的输出速度(减速、增速或变速),以适合工作机构的工作需要;
2、改变动力机输出的转矩,以满足工作机构的要求;
3、把动力机输出的运动形式转变为工作机构所需的运动形式〔如将旋转运动改变为直线运动,或反之)。
4、将一个动力机的机械能传送到数个工作机构,或将数个动力机的机械能传递到一个工作机构。
5、其他的特殊作用,如有利于机器的装配、、维护和安全等而采用机械减速机装置。减速机是一种相对精密的机械,使用它的目的是降低转速,增加转矩。它的种类繁多,型号各异,不同种类有不同的用途分类。
EAMON(伊明)行星减速机的特点及原由
主要传动结构为:3个行星轮,1个太阳轮,1个外齿圈.行星轮减速其实就是齿轮减速的原理,它有一个轴线位置固定的齿轮叫中心轮或太阳轮,在太阳轮边上有轴线变动的齿 轮,即既作自转又作公转的齿轮叫行星轮,行星轮有支持构件叫行星架,通过行星架将动力传到轴上,再传给其它齿轮.它们由一组若干个齿轮组成一个轮系.只有 一个原动件,这种周转轮系称为行星轮系.
主要特点介绍:
一、高速比和率、 传动,效率在90%以上,如果采用多级传动,减速比更大。
二、结构紧凑体积小,由于采用了行星传动原理,输入轴与输入轴在同一轴心上,所以结构紧凑,体积小。
三、运转平稳噪声低,齿啮合齿数较多,重叠系数大以及具有机件平稳的机理,使振动和噪声限制在程度。
四、使用可靠、寿命长。因主要零件采用轴承钢,经淬火(HRC58-62)获得高强度,并且部分传动接触采用了滚动摩擦,所以经久耐用寿命长。
1、无刷直流电机的电机本体:定子绕组为集中绕组,永磁转子形成方波磁场; 永磁同步电机的电机本体:定子绕组为分布绕组,永磁转子形成正玄磁场; 2、无刷直流电机的位置传感器:低分辨率,60度分辨率,霍尔元件,电磁式、光电式; 永磁同步电机的位置传感器:高分辨率,1/256,1/1024,旋转变压器,光码盘; 3、控制不同: 无刷直流电机:120度方波电流,采用PWM控制; 永磁同步电机:正玄波电流,采用SPWM SVPWM控制。
无刷直流电机:磁钢为方波充磁,控制电压PWM也为方波,电流也为方波。一个 电周期有6个空间矢量。控制简单,成本低,一般的MCU就可实现。 永磁同步电机:磁钢为正弦波充磁,反电动势也为正弦波,电流也为正弦波。一 般采用矢量控制技术,一个电周期一般 少会有18个矢量(当然越 多越好),需要高性能的MCU或DSP才能实现。 直流伺服:这个范围就很广了啊。直流伺服,指直流电机再控制系统的控制下, 根据控制指令(转速、位置、角度等)来进行动作,一般用于执行机 构。
一、传感器的不同: 直流无刷电机(BLDC):位置传感器,如霍尔等; 永磁同步电机(PMSM):速度和位置传感器,如旋转变压器、光电编码器等; 二、反电势波形不同: BLDC :近似梯形波(理想状态); PMSM :正弦波(理想状态 三、三相电流波形不同: BLDC :近似方波或梯形波(理想状态); PMSM :正弦波(理想状态 四、控制系统的区别: BLDC:通常包括位置控制器、速度控制器和电流(转矩)控制器; PMSM:不同控制策略的会有不同的控制系统; 五、设计的原理与方法上的区别: BLDC:尽量拓宽反电势波形的宽度(使之近似为梯行波); PMSM:使反电势接近与正弦波; 体现在设计上主要是定子绕组、转子结构(如极弧系数)上的区别。
网友评论:(注:网友评论仅供其表达个人看法,并不表明盛丰建材网。)
查看更多评论