站集乡传动装置:直连式ZPLE160-75高防护步进减速机
因为扳手钳口是双六角形的,可以容易地装配螺栓/螺母。这可以在一个有限空间内重新。撬棒呆扳手如何使用:在使用撬棒呆扳手时,左手推住撬棒呆扳手与螺栓连接处,保持撬棒呆扳手与螺栓完全配合,防止滑脱,右手握住撬棒呆扳手另一端并加力。撬棒呆扳手可将螺栓、螺母的头部全部围住,因此不会损坏螺栓角,可以施加大力矩。扳转时,严禁将加长的管子套在扳手上以延伸扳手的长度增加力矩,严禁捶击扳手以增加力矩,否则会造成工具的损坏。
站集乡传动装置:直连式ZPLE160-75高防护步进减速机
行星减速机在设计时要考虑以下要求:
一、行星减速机设计时原始和数据。例如:原电机的类型、规格、转速、工作机械的类型等等。
二、初定各项工艺方法及参数。
三、选定行星减速机的类型和形式。
四、初定计算齿轮中心距的模数及几何参数。
五、确定传动级数。依照总传动比,确定传动的级数和各级传动比。
六、整体方案设计,要确定行星减速机的结构、轴的尺寸、轴承型号等等。
七、要确定齿轮渗碳深度。
八、要确定行星减速机的附件。
九、冷却润滑的计算。
十、要选定行星减速机的类型和方式。
一般情况下行星减速机是配伺服电机和步进电机使用,为了提升电机的扭矩,减少成本。
站集乡传动装置:直连式ZPLE160-75高防护步进减速机
用伺服电机替代步进电机时应注意哪些问题:
1、为了保证控制系统改变不大,应选用数字式伺服系统,可仍采用原来的脉冲控制方式;
2、由于伺服电机的过载能力强,可以参照原步进电机额定输出扭矩的1/3来确定伺服电机的额定扭矩;
3、因为伺服电机的额定转速比步进电机要高得多,增加减速装置,让伺服电机工作在接近额定转速下,
这样也可以选择功率更小的电机,以降低成本。
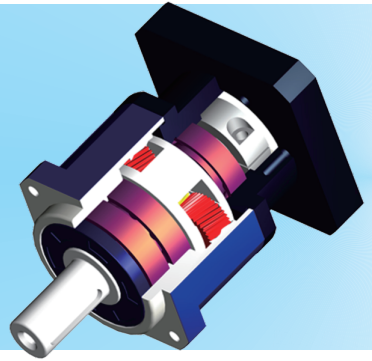
行星减速机是一种应用广泛的减速机,它的主要传动结构为:行星轮,太阳轮,外齿圈,并合着线针齿啮合的转动方式来工作。 由于减速机的这种转动结构,使得它的单级减速一般在3-10之间,常见减速比为:3.4.5.6.8.10 。行星减速机是由针齿啮合来工作转动的,由于行星齿轮的套数一套齿轮无法满足较大的传动比,有时需要2套或者3套来满足拥护较大的传动比的要求,但同时2级或3级减速机的长度会有所增加,导致效率会有所下降。 前面说过它主要传动结构为:行星轮,太阳轮,外齿圈 ,使得行星减速机多数是在步进电机和伺服电机上,行星我们都知道行星是围绕着太阳运动的有着不同的轨迹方式,同样行星减速机的这种结构也决定了它的几种不同工作转动方式: 1)太阳轮固定,齿圈主动,行星架被动,它的转向相同这种组合为降速传动,传动比一般为1.25~1.67 2)齿圈固定,行星架主动,太阳轮被动,它的转向相同这种组合为升速传动,传动比一般为0.2~0.4 3)齿圈固定,太阳轮主动,行星架被动,它的转向相同这种组合为降速传动,通常传动比一般为2.5~5 4)太阳轮固定,行星架主动,齿圈被动,它的转向相同这种组合为升速传动,传动比一般为0.6~0.8 5)行星架固定,齿圈主动,太阳轮被动,它的转向相反这 6)行星架固定,太阳轮主动,齿圈被动,它的转向相反这种组合为降速传动,传动比一般为1.5~4 由于结构的原因,使得它的传动种类不同能广泛应用于各类传动机械行业中。
站集乡传动装置:直连式ZPLE160-75高防护步进减速机
14.3
强化模具精度概念认识1。模具是指用作批量成形冲压等制品的精密成形工具。模具精度包括上获得的零件精度和生产时保证产品精度的质量意识,但通常所讲的模具精度,主要是指模具工作零件的精度。。模具中的精度概念是指模具零件及后的实际几何参数与设计几何参数的符合程度。。模具生产中的精度概念是指企业职工在生产实践中逐步形成的、指导职工生产行为的一各思维模式,一种质量意识,即在企业职工的行为中,始终贯彻把握产品精度的质量意识。模具精度的内容包括四个方面:尺寸精度、形状精度、位置精度、表面精度。由于模具在工作时分上模、下模两部分,故在四种精度中以上、下模间相互位置精度 为重要。模具精度是为制品精度服务的,高精度的制品必须由更高精度的模具来保证,模具精度一般须高于制件精度2级或者2级以上。提高模具精度方法1。模具设备的精度保证2。模具的零件精度要求。模具材料精度要求模具钢材公差控制标准模板大小精板厚度平面度3X3内+.5-.53X5内+.1-